
Shijie Wang
Ph.D. Candidate
The Hong Kong Polytechnic University (PolyU)
Supervisor: Dr. Fan Wenqi
Co-supervisor: Prof. Li Qing
Email: shijie.wang(at)connect.polyu.hk
Office: PQ609, Kowloon, Hong Kong SAR
Google Scholar GitHub Linkedin
Bio
I am a fourth-year PhD Candidate in the department of Computing of The Hong Kong Polytechnic University (PolyU), advised by Assistant Professor Fan Wenqi and Prof. Li Qing. My current research focuses on Large Language Models (LLMs), Retrieval-Augmented Generation (RAG) and Graph Neural Networks (GNNs) as well as their applications in recommender systems (RecSys). I am currently a visiting scholar at the Institute of Data Science (IDS), National University of Singapore (NUS) , under the supervision of Prof. Ng See-Kiong .
I obtained my BSc degree in Information and Computing Science from Xi’an Jiaotong-Liverpool University in China and the University of Liverpool in the UK in July, 2022.
I am currently on the market and actively looking for opportunities in Recommender Systems, Ads tech and other LLM-related positions in both academia and industry. Please feel free to contact me at shijie.wang[at]connect[dot]polyu[dot]hk if you have any available position.
News
- May 2026: our paper “Mixture-of-Experts Knowledge Graph Retrieval-Augmented Generation for Multi-Agent LLM-based Recommendation“ is accepted by KDD 2026🎉.
- May 2026: our paper “Atomic Intent Reasoning: Bringing LLM Semantics to Industrial Cross-Domain Recommendations“ is accepted by KDD Industry 2026🎉.
- Apr 2026: our paper “ReRec: Reasoning-Augmented LLM-based Recommendation Assistant via Reinforcement Fine-tuning“ is accepted by ACL main 2026🎉.
- Oct 2025: our paper “Towards Next-Generation Recommender Systems: A Benchmark for Personalized Recommendation Assistant with LLMs“ is accepted by WSDM 2026🎉.
- Oct 2025: our paper “Continuous-time Discrete-space Diffusion Model for Recommendation“ is accepted by WSDM 2026🎉.
- Aug 2025: our paper “Score-based Generative Diffusion Models for Social Recommendations“ is accepted by IEEE Transactions on Knowledge and Data Engineering (TKDE)🎉.
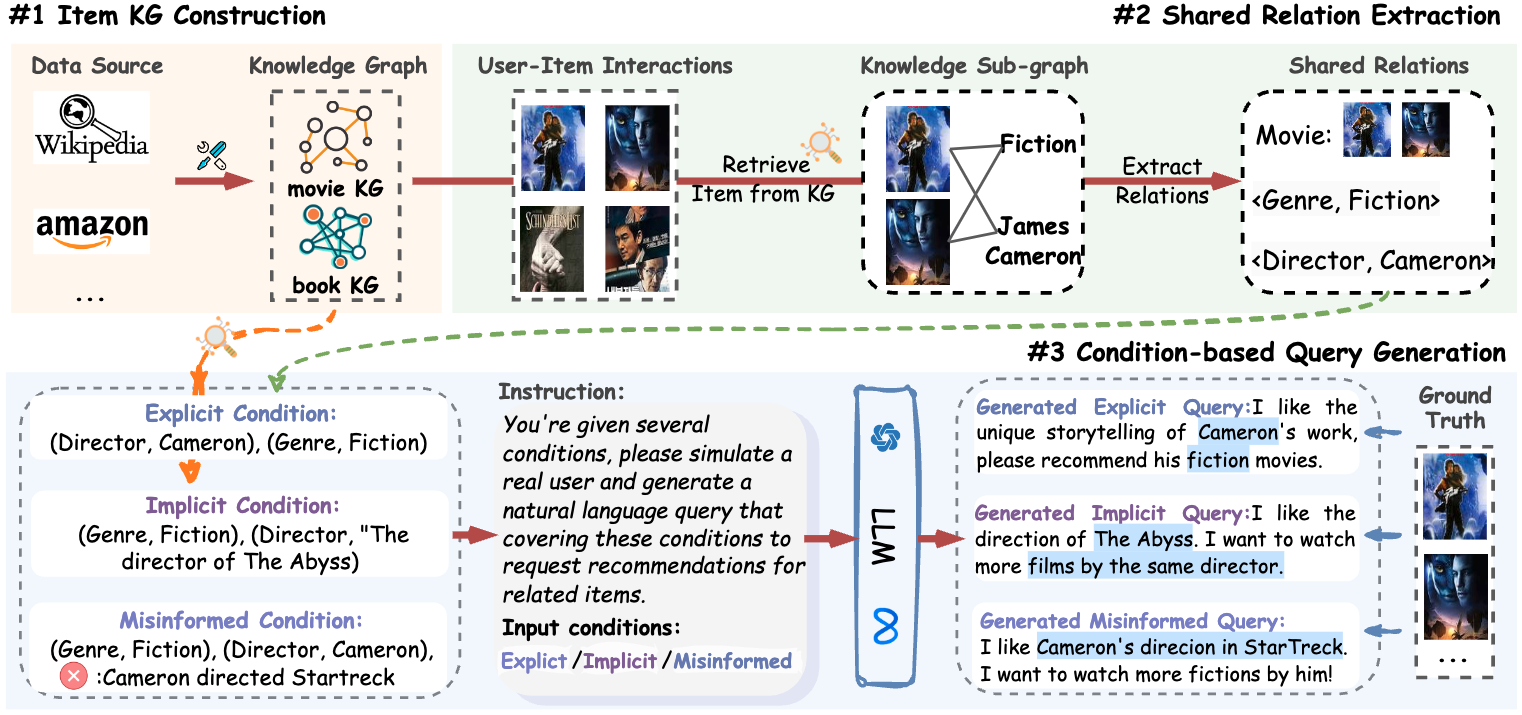
- May 2025: our paper “Knowledge Graph Retrieval-Augmented Generation for LLM-based Recommendation” is accepted by ACL main 2025🎉.
- Apr 2025: our paper “Tree-of-AdEditor: Heuristic Tree Reasoning for Automated Video Advertisement Editing with Large Language Model” got accepted by IJCAI 2025🎉.
- Mar 2025: our survey on “Graph Machine Learning in the Era of Large Language Models (LLMs)” is accepted by Transactions on Intelligent Systems and Technology (TIST)🎉.
- Dec 2024: our tutorial on “Towards Retrieval-Augmented Large Language Models: Data Management and System Design” is accepted by ICDE 2025🎉.
- Sep 2024: our paper “Multi-agent Attacks for Black-box Social Recommendations” is accepted by Transactions on Information Systems (TOIS)🎉.
- May 2024: our tutorial and survey paper “A Survey on RAG Meets LLMs: Towards Retrieval-Augmented Large Language Models” got accepted by KDD 2024🎉.
- May 2024: our paper “CheatAgent: Attacking LLM-Empowered Recommender Systems via LLM Agent” is accepted by KDD 2024🎉.
Selected Publications
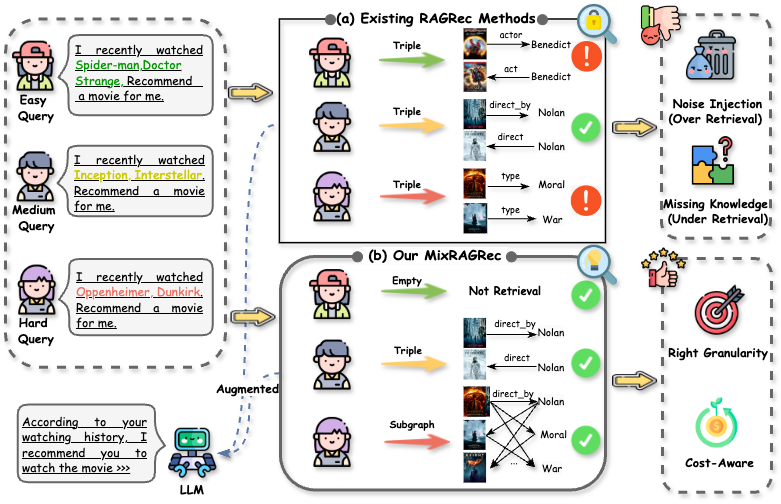
Mixture-of-Experts Knowledge Graph Retrieval-Augmented Generation for Multi-Agent LLM-based Recommendation
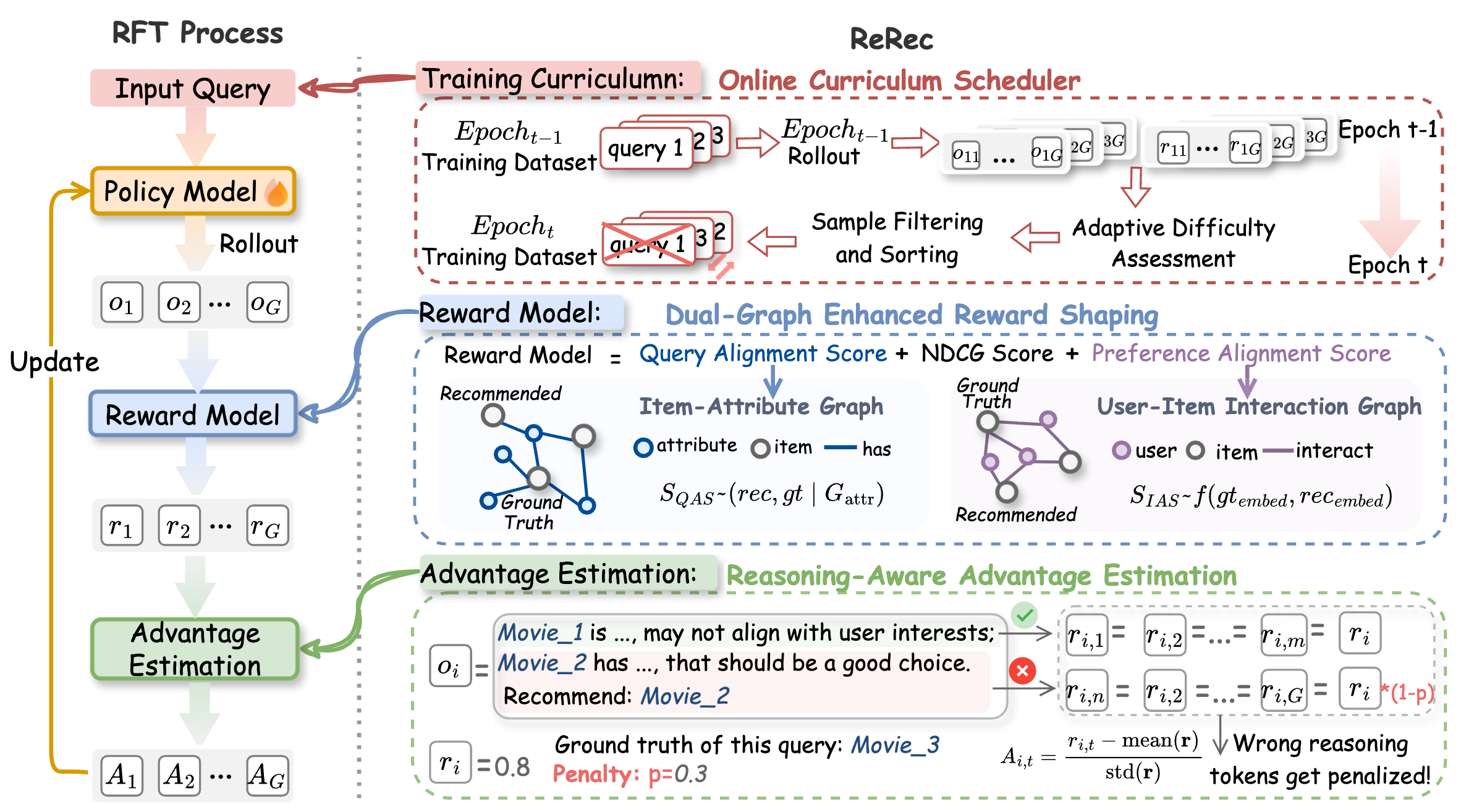
ReRec: Reasoning-Augmented LLM-based Recommendation Assistant via Reinforcement Fine-tuning
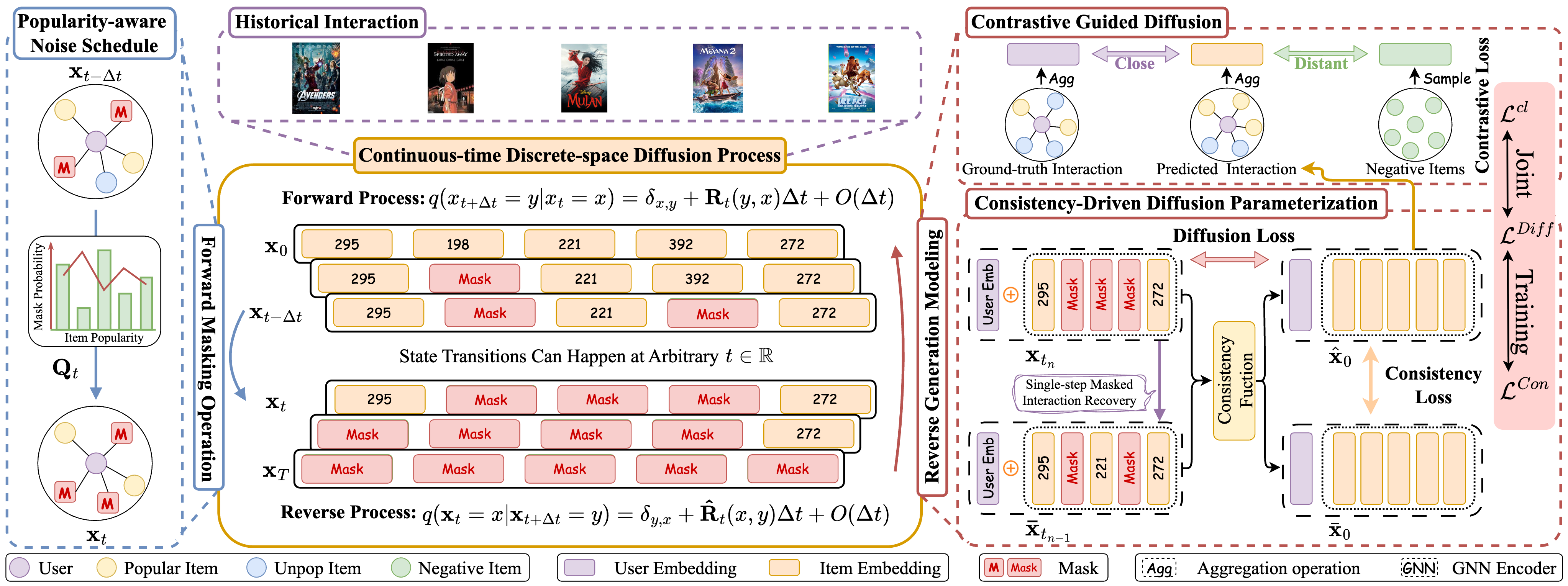
Continuous-time Discrete-space Diffusion Model for Recommendation
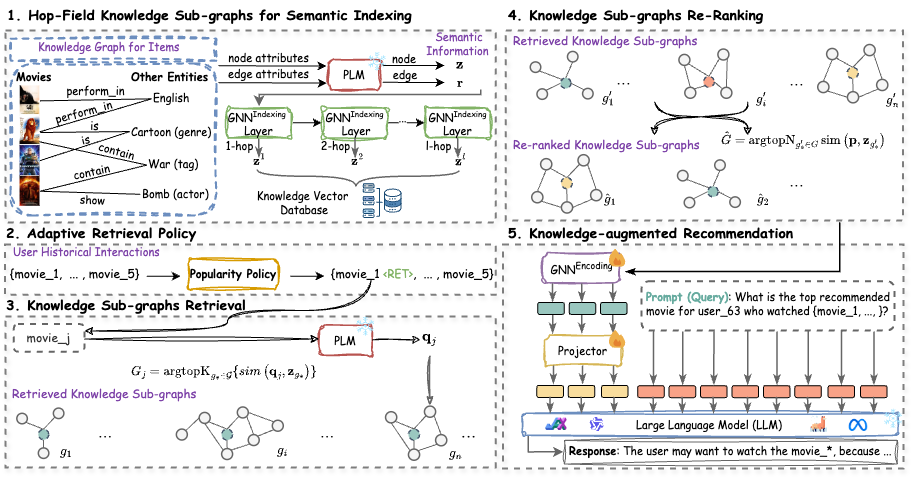
Knowledge Graph Retrieval-Augmented Generation for LLM-based Recommendation
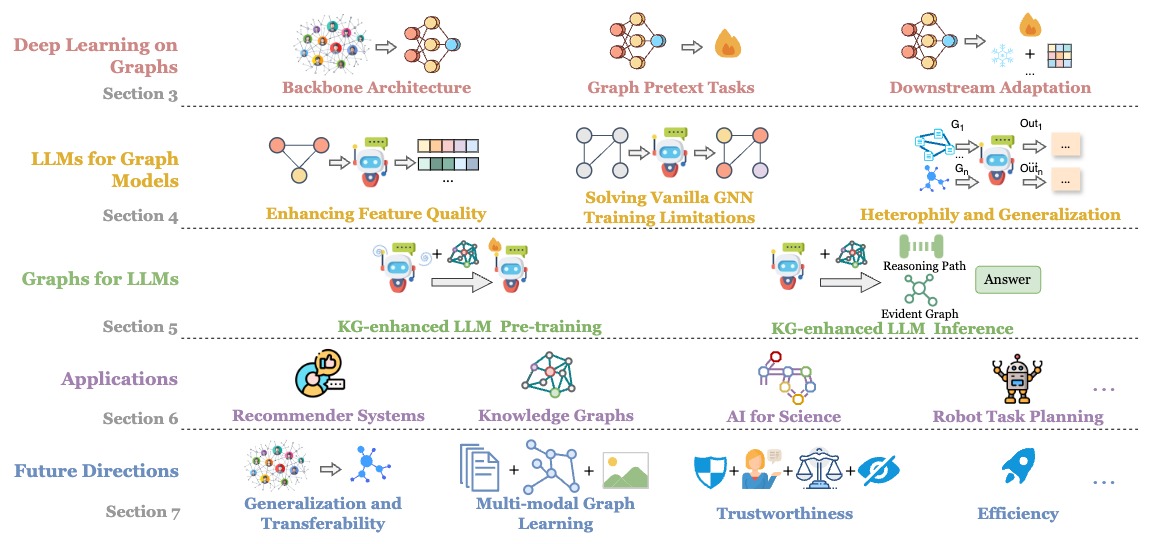
Graph Machine Learning in the Era of Large Language Models (LLMs)
Towards Next-Generation Recommender Systems: A Benchmark for Personalized Recommendation Assistant with LLMs
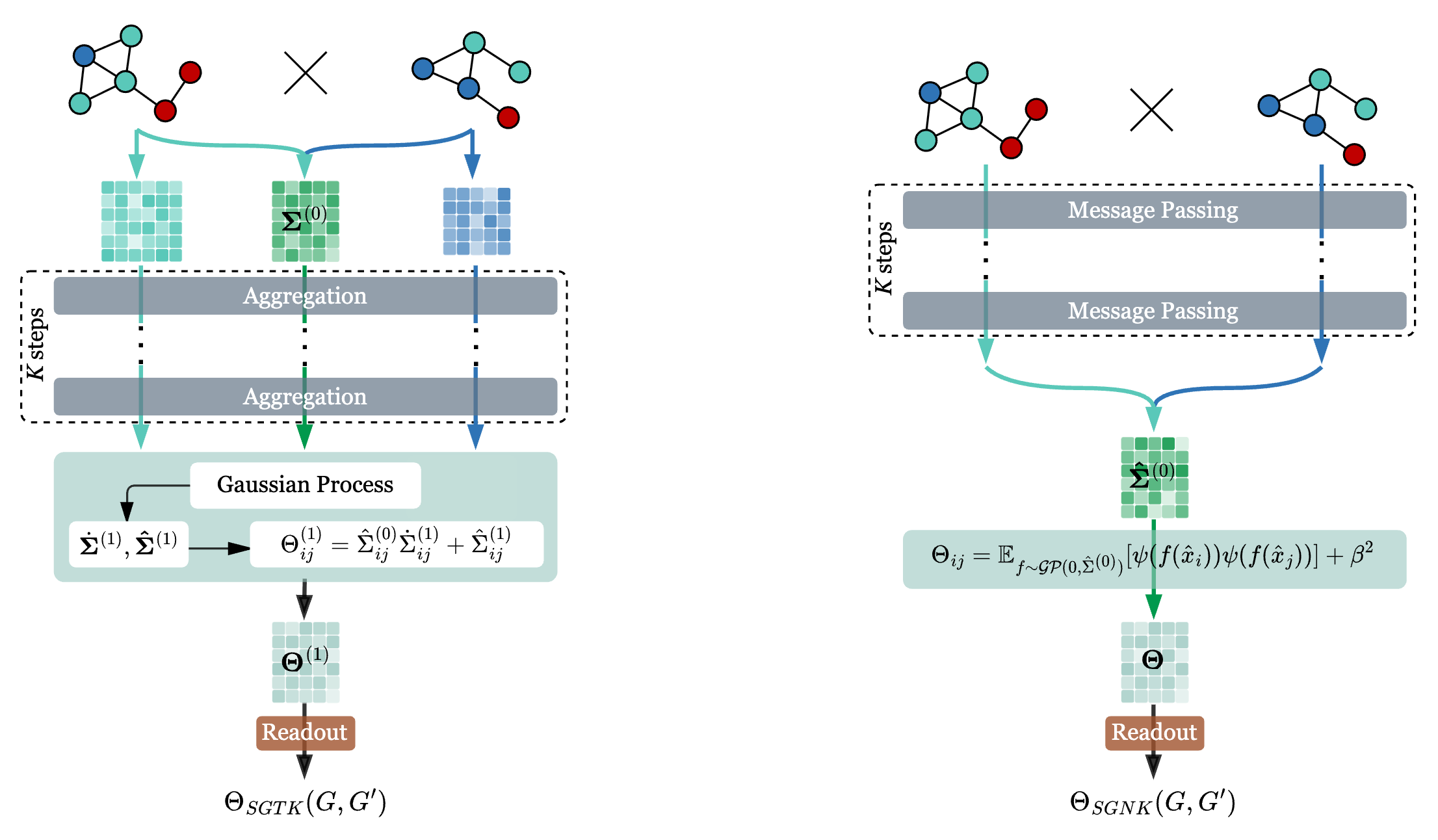
Simplifying Graph Kernels for Efficient
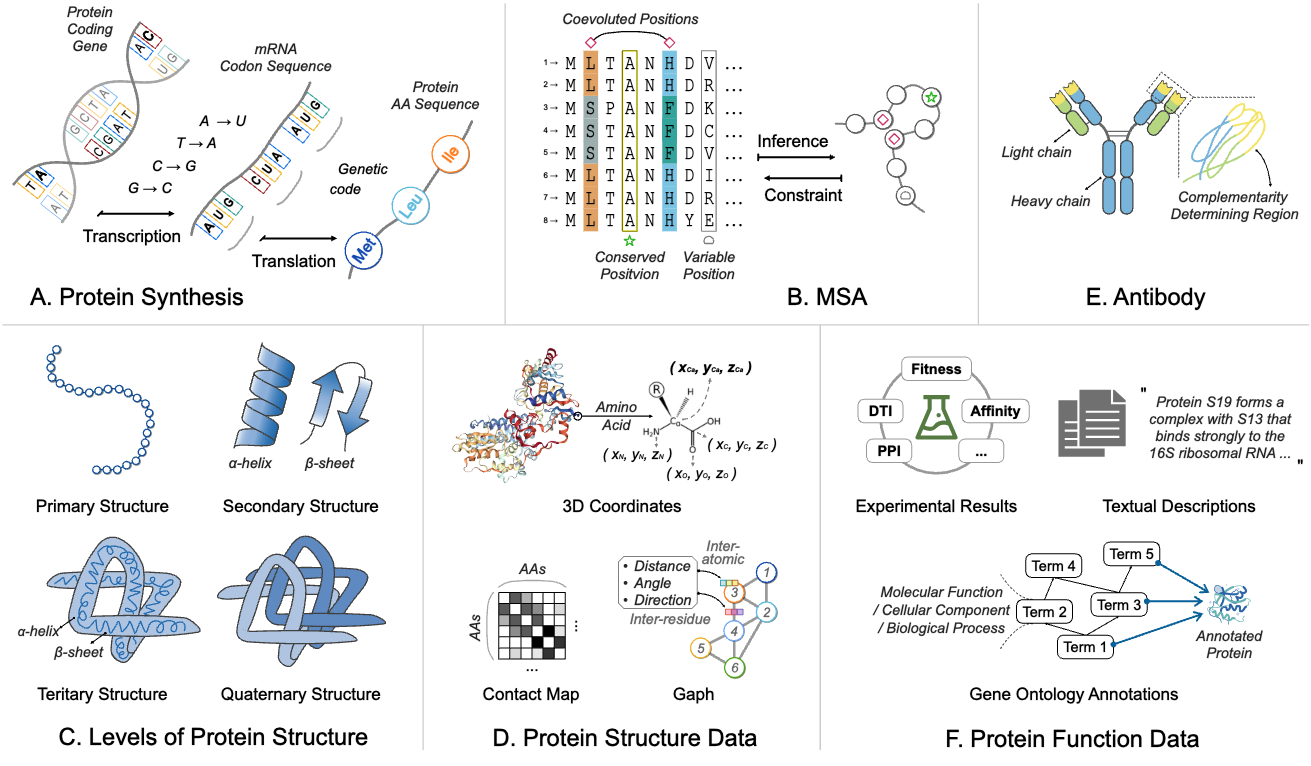
Computational Protein Science in the Era of Large Language Models (LLMs)
Score-based Generative Diffusion Models for Social Recommendations
Multi-agent Attacks for Black-box Social Recommendations
CheatAgent: Attacking LLM-Empowered Recommender Systems via LLM Agent
A Survey on RAG Meets LLMs: Towards Retrieval-Augmented Large Language Models
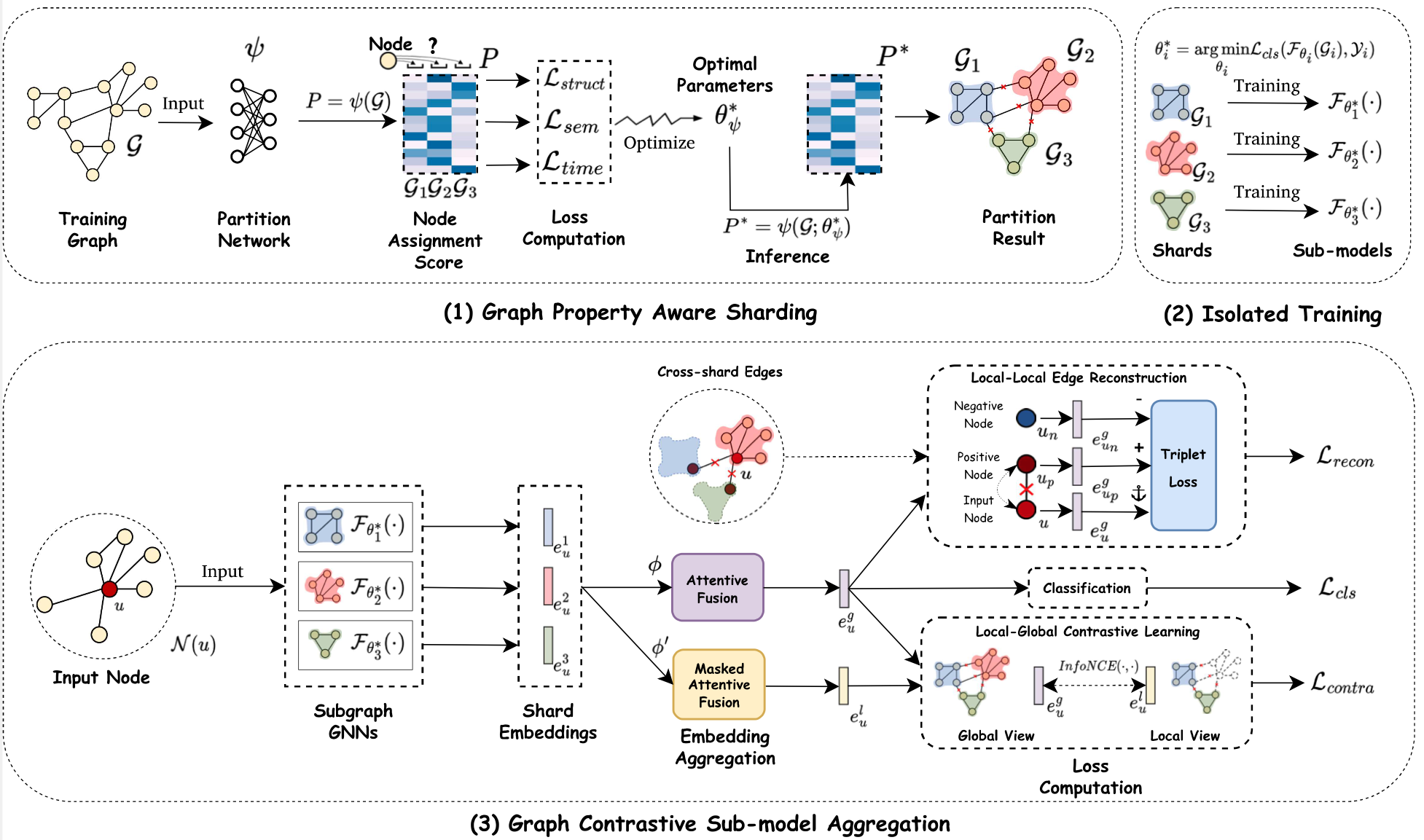
Graph Unlearning with Efficient Partial Retraining
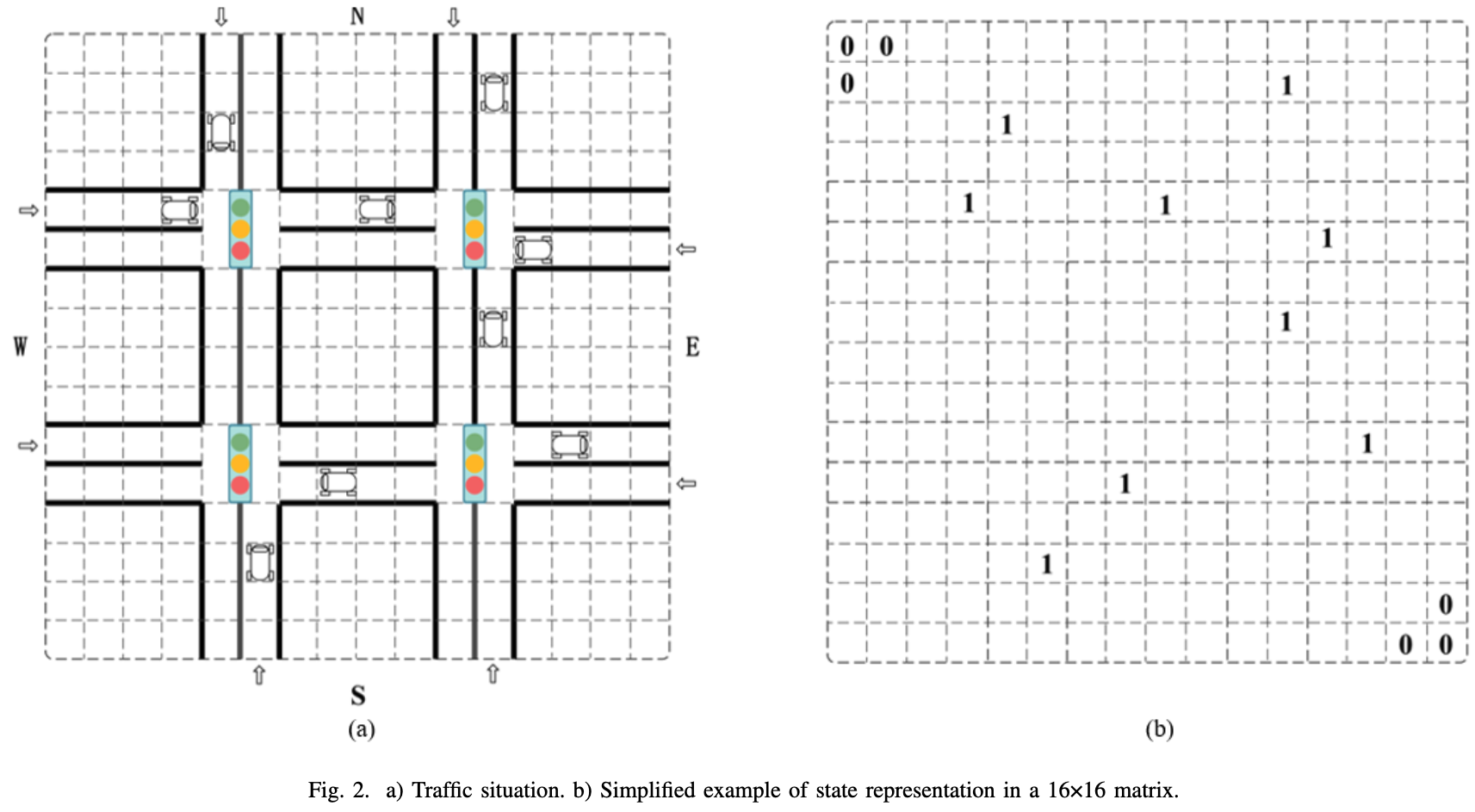
A novel Multi-Agent Deep RL Approach for Traffic Signal Control
Cite Simplifying Graph Kernels for Efficient
@article{wang2025simplifying,
title={Simplifying Graph Kernels for Efficient},
author={Wang, Lin and Wang, Shijie and Huang, Sirui and Li, Qing},
journal={arXiv preprint arXiv:2507.03560},
year={2025}
}
Cite ReRec: Reasoning-Augmented LLM-based Recommendation Assistant via Reinforcement Fine-tuning
@article{huang2026rerec,
title={ReRec: Reasoning-Augmented LLM-based Recommendation Assistant via Reinforcement Fine-tuning},
author={Huang, Jiani and Wang, Shijie and Ning, Liangbo and Fan, Wenqi and Li, Qing},
journal={arXiv preprint arXiv:2604.07851},
year={2026}
}
Cite Continuous-time Discrete-space Diffusion Model for Recommendation
@article{liu2025continuous,
title={Continuous-time Discrete-space Diffusion Model for Recommendation},
author={Liu, Chengyi and Chen, Xiao and Wang, Shijie and Fan, Wenqi and Li, Qing},
journal={arXiv preprint arXiv:2511.12114},
year={2025}
}
Cite Towards Next-Generation Recommender Systems: A Benchmark for Personalized Recommendation Assistant with LLMs
@article{huang2025towards,
title={Towards Next-Generation Recommender Systems: A Benchmark for Personalized Recommendation Assistant with LLMs},
author={Huang, Jiani and Wang, Shijie and Ning, Liang-bo and Fan, Wenqi and Wang, Shuaiqiang and Yin, Dawei and Li, Qing},
journal={arXiv preprint arXiv:2503.09382},
year={2025}
}
Cite Computational Protein Science in the Era of Large Language Models (LLMs)
@article{fan2025computational,
title={Computational Protein Science in the Era of Large Language Models (LLMs)},
author={Fan, Wenqi and Zhou, Yi and Wang, Shijie and Yan, Yuyao and Liu, Hui and Zhao, Qian and Song, Le and Li, Qing},
journal={arXiv preprint arXiv:2501.10282},
year={2025}
}
Cite Knowledge Graph Retrieval-Augmented Generation for LLM-based Recommendation
@article{wang2025knowledge,
title={Knowledge Graph Retrieval-Augmented Generation for LLM-based Recommendation},
author={Wang, Shijie and Fan, Wenqi and Feng, Yue and Ma, Xinyu and Wang, Shuaiqiang and Yin, Dawei},
journal={arXiv preprint arXiv:2501.02226},
year={2025}
}
Cite Score-based Generative Diffusion Models for Social Recommendations
@article{liu2024score,
title={Score-based Generative Diffusion Models for Social Recommendations},
author={Liu, Chengyi and Zhang, Jiahao and Wang, Shijie and Fan, Wenqi and Li, Qing},
journal={arXiv preprint arXiv:2412.15579},
year={2024}
}
Cite CheatAgent: Attacking LLM-Empowered Recommender Systems via LLM Agent
@inproceedings{ning2024cheatagent,
title={CheatAgent: Attacking LLM-Empowered Recommender Systems via LLM Agent},
author={Ning, Liang-bo and Wang, Shijie and Fan, Wenqi and Li, Qing and Xu, Xin and Chen, Hao and Huang, Feiran},
booktitle={Proceedings of the 30th ACM SIGKDD Conference on Knowledge Discovery and Data Mining},
pages={2284--2295},
year={2024}
}
Cite A Survey on RAG Meets LLMs: Towards Retrieval-Augmented Large Language Models
@article{ding2024survey,
title={A Survey on RAG Meets LLMs: Towards Retrieval-Augmented Large Language Models},
author={Ding, Yujuan and Fan, Wenqi and Ning, Liangbo and Wang, Shijie and Li, Hengyun and Yin, Dawei and Chua, Tat-Seng and Li, Qing},
journal={arXiv preprint arXiv:2405.06211},
year={2024}
}
Cite Graph Machine Learning in the Era of Large Language Models (LLMs)
@article{fan2024graph,
title={Graph Machine Learning in the Era of Large Language Models (LLMs)},
author={Fan, Wenqi and Wang, Shijie and Huang, Jiani and Chen, Zhikai and Song, Yu and Tang, Wenzhuo and Mao, Haitao and Liu, Hui and Liu, Xiaorui and Yin, Dawei and others},
journal={arXiv preprint arXiv:2404.14928},
year={2024}
}
Cite Graph Unlearning with Efficient Partial Retraining
@article{zhang2024graph,
title={Graph Unlearning with Efficient Partial Retraining},
author={Zhang, Jiahao and Wang, Lin and Wang, Shijie and Fan, Wenqi},
journal={arXiv preprint arXiv:2403.07353},
year={2024}
}Cite Multi-agent Attacks for Black-box Social Recommendations
@article{wang2023multi,
title={Multi-agent Attacks for Black-box Social Recommendations},
author={Wang, Shijie and Fan, Wenqi and Wei, Xiao-yong and Mei, Xiaowei and Lin, Shanru and Li, Qing},
journal={ACM Transactions on Information Systems},
year={2023},
publisher={ACM New York, NY}
}Cite Mixture-of-Experts Knowledge Graph Retrieval-Augmented Generation for Multi-Agent LLM-based Recommendation
@article{wang2026mixture,
title={Mixture-of-Experts Knowledge Graph Retrieval-Augmented Generation for Multi-Agent LLM-based Recommendation},
author={Wang, Shijie and Liu, Chengyi and Ding, Yujuan and Lin, Shanru and Ng, See-Kiong and Xin, Xu and Fan, Wenqi},
journal={arXiv preprint arXiv:2605.28175},
year={2026}
}Cite A novel multi-agent deep RL approach for traffic signal control
@inproceedings{shijie2023novel,
title={A novel multi-agent deep RL approach for traffic signal control},
author={Shijie, Wang and Shangbo, Wang},
booktitle={2023 IEEE International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events (PerCom Workshops)},
pages={15--20},
year={2023},
organization={IEEE}
}