Resarch
I’m interested in Data Mining, and Artificial Intelligence. My current research focuses mainly on:
-
Graph Learning
-
Recommender Systems (RecSys)
-
Large Language Models (LLMs)
-
Trustworthy AI
Tutorials
- Wenqi Fan, Pangjing Wu, Yujuan Ding, Liangbo Ning, Shijie Wang, and Qing Li Towards Retrieval-Augmented Large Language Models: Data Management and System Design IEEE International Conference on Data Engineering (ICDE, Tutorial), 2025.
- Yujuan Ding, Wenqi Fan, Liangbo Ning, Shijie Wang, Hengyun Li, Dawei Yin, Tat-Seng Chua, and Qing Li RAG Meets LLMs: Towards Retrieval-Augmented Large Language Models SIGKDD Conference on Knowledge Discovery and Data Mining (KDD, Tutorial), 2024.
- Yujuan Ding, Shijie Wang, Liangbo Ning, Qiaoyu Tan, Wenqi Fan, and Qing Li Recommender Systems in the Era of Large Language Models (LLMs) International Joint Conference on Artificial Intelligence (IJCAI, Tutorial), 2024.
- Wenqi Fan, Xiangyu Zhao, Lin Wang, Xiao Chen, Jingtong Gao, Qidong Liu, and Shijie Wang Trustworthy Recommender Systems: Foundations and Frontiers SIGKDD Conference on Knowledge Discovery and Data Mining (KDD, Tutorial), 2023.
- Wenqi Fan, Xiangyu Zhao, Shijie Wang, Xiao Chen, Jingtong Gao, Qidong Liu, and Lin Wang Trustworthy Recommender Systems: Foundations and Frontiers International Joint Conference on Artificial Intelligence (IJCAI, Tutorial), 2023.
- Wenqi Fan, Xiangyu Zhao, Lin Wang, Xiao Chen, Jingtong Gao, Qidong Liu, and Shijie Wang Trustworthy Recommender Systems The Web Conference (WWW, Tutorial), 2023.
Publications
* indicates equal contribution.
Shijie Wang,
Chengyi Liu, Yujuan Ding, Shanru Lin, See-Kiong Ng, Xu Xin, Wenqi Fan
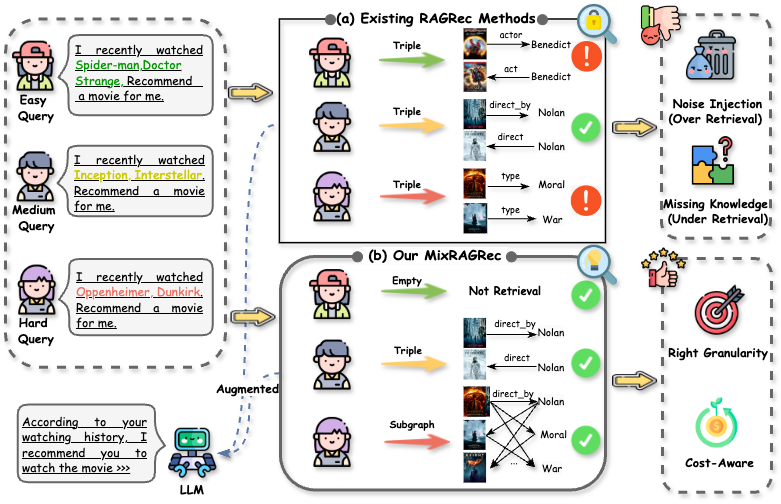
Mixture-of-Experts Knowledge Graph Retrieval-Augmented Generation for Multi-Agent LLM-based Recommendation
Mixture-of-Experts Knowledge Graph Retrieval-Augmented Generation for Multi-Agent LLM-based Recommendation
In
KDD oral,
2026.
LLM-based recommender systems often rely on parametric knowledge and suffer from outdated knowledge, motivating knowledge graph retrieval-augmented generation (KG-RAG). We propose MixRAGRec, a cooperative multi-agent framework that integrates a Mixture-of-Experts Retrieval Agent routing each query to a KG retrieval expert at different granularities, a Knowledge Preference Alignment Agent that converts structured knowledge into LLM-friendly natural language, and a Contrastive Learning-reinforced Recommendation Agent. We introduce MMAPO (Mixture-of-Experts Multi-Agent Policy Optimization) to train the three agents under a unified objective.
Jiani Huang,
Shijie Wang,
Liangbo Ning, Wenqi Fan, Qing Li
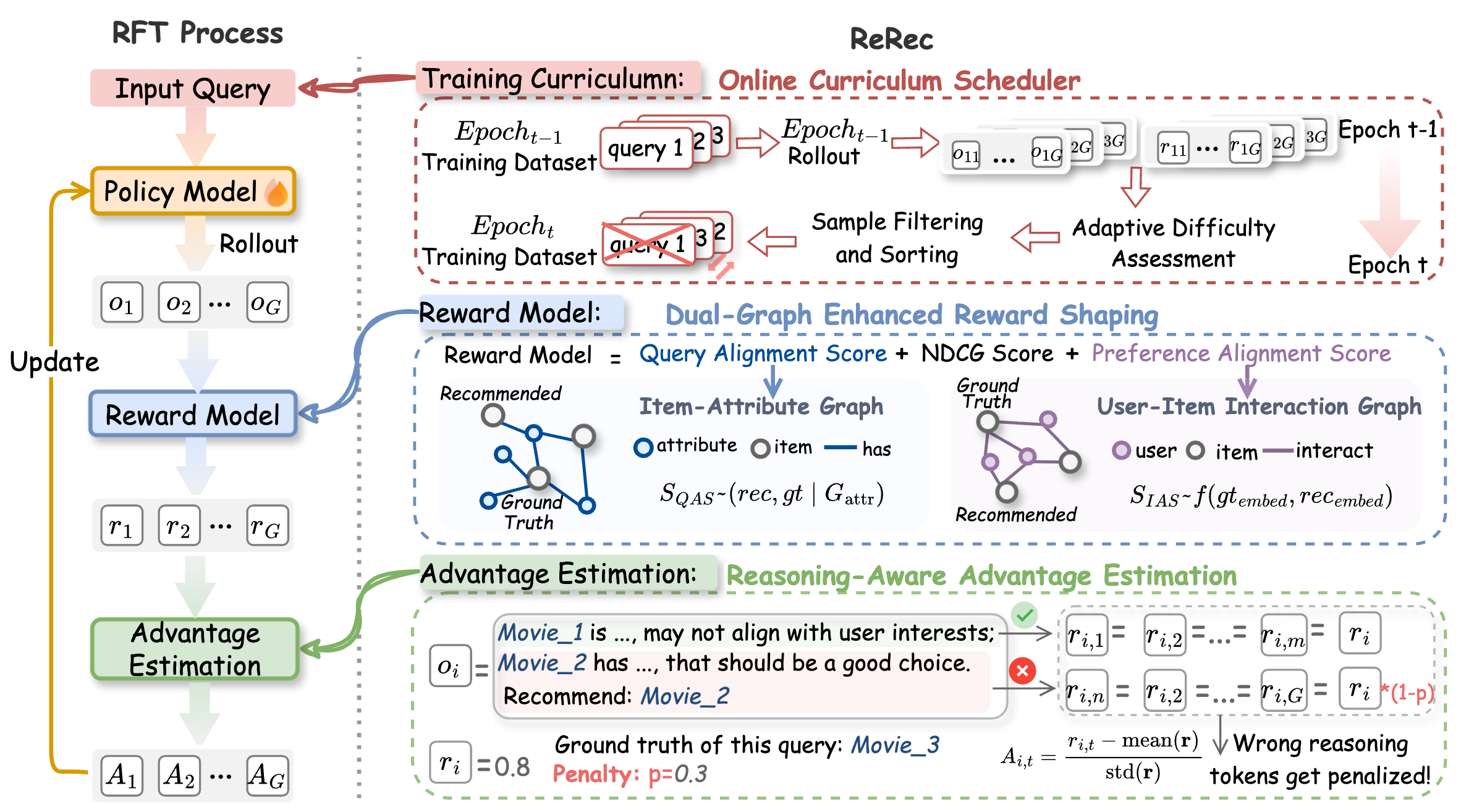
ReRec: Reasoning-Augmented LLM-based Recommendation Assistant via Reinforcement Fine-tuning
ReRec: Reasoning-Augmented LLM-based Recommendation Assistant via Reinforcement Fine-tuning
In
ACL main,
2026.
With the rise of LLMs, there is an increasing need for intelligent recommendation assistants that can handle complex queries and provide personalized, reasoning-driven recommendations. We propose ReRec, a reinforcement fine-tuning (RFT) framework that improves LLM reasoning in complex recommendation tasks via dual-graph enhanced reward shaping, reasoning-aware advantage estimation, and an online curriculum scheduler. Experiments show ReRec outperforms strong baselines while preserving instruction-following and general knowledge.
Chengyi Liu, Xiao Chen
Shijie Wang,
Wenqi Fan, Qing Li
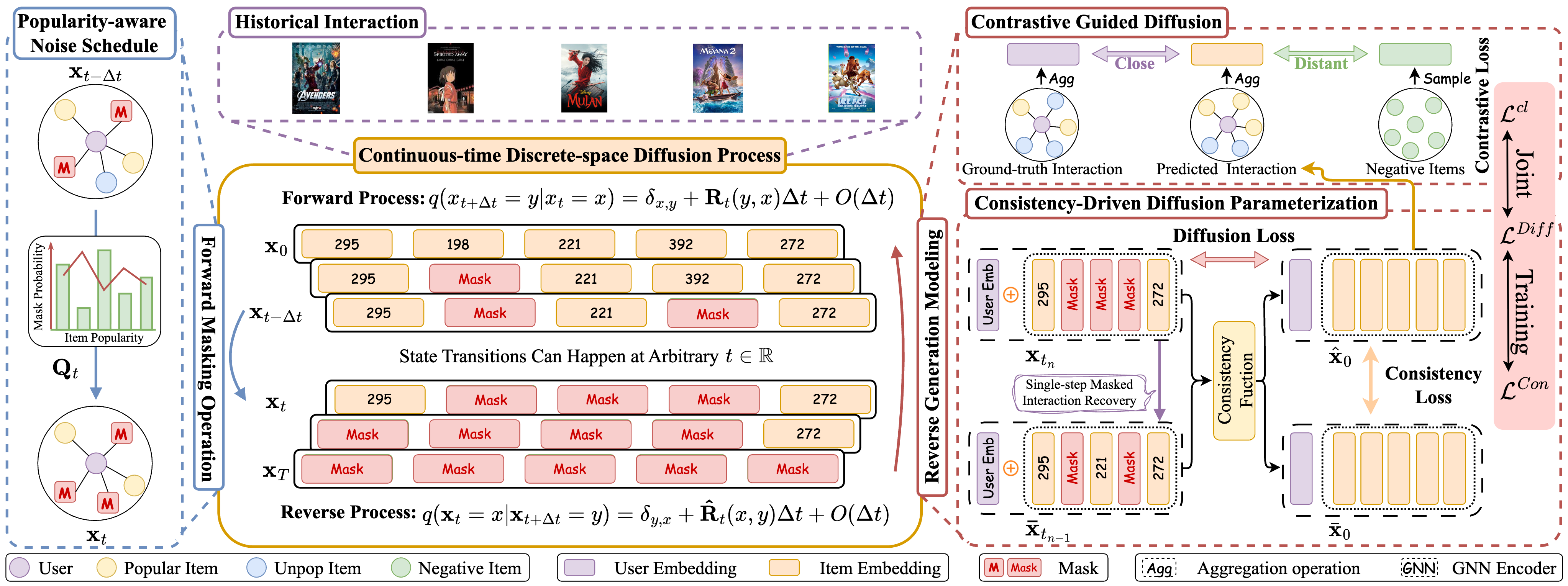
Continuous-time Discrete-space Diffusion Model for Recommendation
Continuous-time Discrete-space Diffusion Model for Recommendation
In
WSDM,
2026.
In the era of information explosion, Recommender Systems (RS) are essential for alleviating information overload and providing personalized user experiences. Recent advances in diffusion-based generative recommenders have shown promise in capturing the dynamic nature of user preferences. These approaches explore a broader range of user interests by progressively perturbing the distribution of user-item interactions and recovering potential preferences from noise, enabling nuanced behavioral understanding. However, existing diffusion-based approaches predominantly operate in continuous space through encoded graph-based historical interactions, which may compromise potential information loss and suffer from computational inefficiency. As such, we propose CDRec, a novel Continuous-time Discrete-space Diffusion Recommendation framework, which models user behavior patterns through discrete diffusion on historical interactions over continuous time.
Shijie Wang,
Wenqi Fan, Yue Feng, Shanru Lin, Xinyu Ma, Shuaiqiang Wang, Dawei Yin
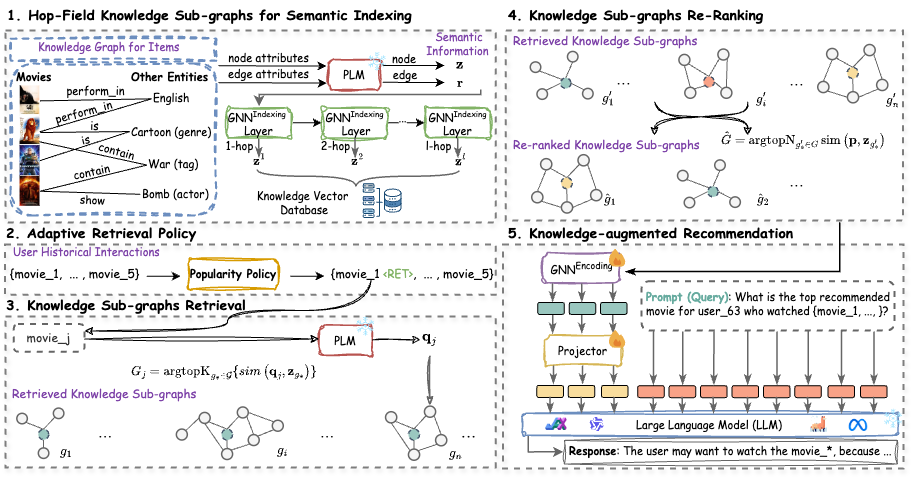
Knowledge Graph Retrieval-Augmented Generation for LLM-based Recommendation
Knowledge Graph Retrieval-Augmented Generation for LLM-based Recommendation
In
ACL main,
2025.
Recently, Retrieval-Augmented Generation (RAG) has garnered significant attention for addressing these limitations by leveraging external knowledge sources to enhance the understanding and generation of LLMs. However, vanilla RAG methods often introduce noise and neglect structural relationships in knowledge, limiting their effectiveness in LLM-based recommendations. To address these limitations, we propose to retrieve high-quality and up-to-date structure information from the knowledge graph (KG) to augment recommendations. Specifically, our approach develops a retrieval-augmented framework, termed K-RagRec, that facilitates the recommendation generation process by incorporating structure information from the external KG. Extensive experiments have been conducted to demonstrate the effectiveness of our proposed method.
Shijie Wang,
Jiani Huang, Wenqi Fan, Zhikai Chen, Yu Song, Wenzhuo Tang, Haitao Mao, Hui Liu, Xiaorui Liu, Dawei Yin, Qing Li
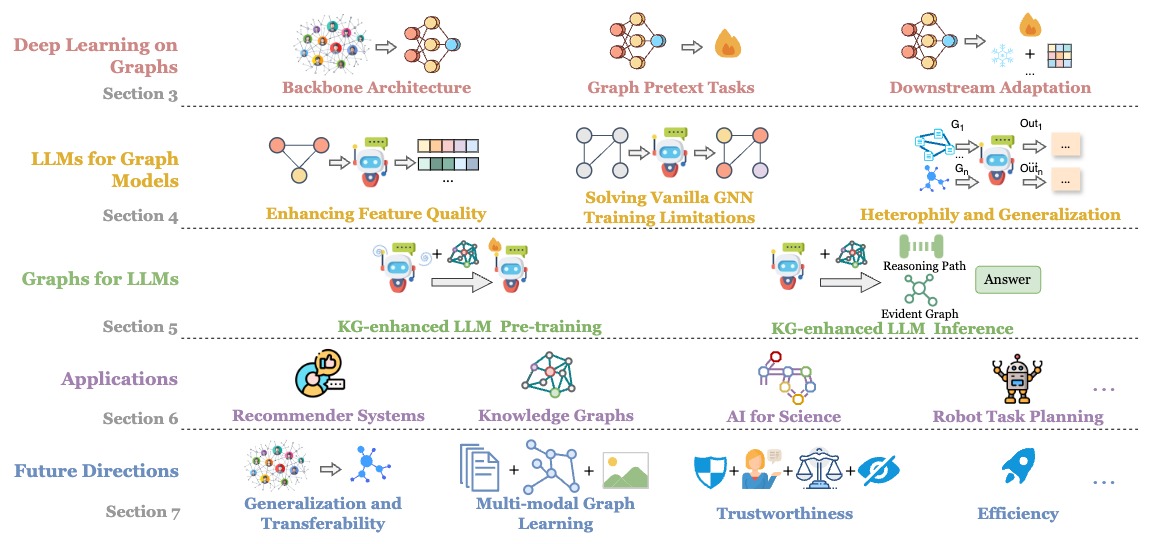
Graph Machine Learning in the Era of Large Language Models (LLMs)
Graph Machine Learning in the Era of Large Language Models (LLMs)
In
Transactions on Intelligent Systems and Technology (TIST),
2025.
In this survey, we first review the recent developments in Graph ML. We then explore how LLMs can be utilized to enhance the quality of graph features, alleviate the reliance on labeled data, and address challenges such as graph heterogeneity and out-of-distribution (OOD) generalization. Afterward, we delve into how graphs can enhance LLMs, highlighting their abilities to enhance LLM pre-training and inference. Furthermore, we investigate various applications and discuss the potential future directions in this promising field.
Jiani Huang,
Shijie Wang,
Liang-bo Ning, Wenqi Fan, Shuaiqiang Wang, Dawei Yin, Qing Li
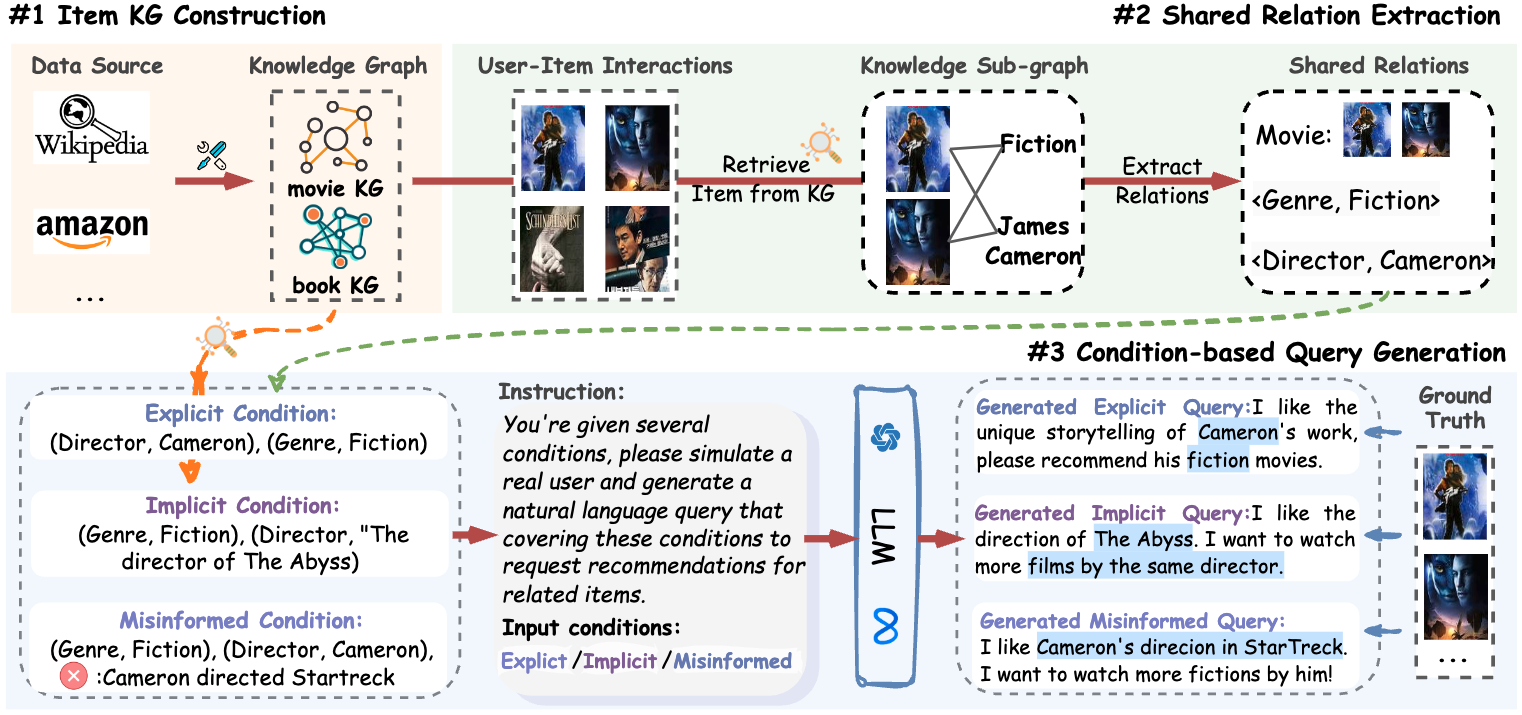
Towards Next-Generation Recommender Systems: A Benchmark for Personalized Recommendation Assistant with LLMs
Towards Next-Generation Recommender Systems: A Benchmark for Personalized Recommendation Assistant with LLMs
In
WSDM,
2026.
Recently, the advancement of large language models (LLMs) has revolutionized the foundational architecture of RecSys, driving their evolution into more intelligent and interactive personalized recommendation assistants. However, most existing studies rely on fixed task-specific prompt templates to generate recommendations and evaluate the performance of personalized assistants, which limits the comprehensive assessments of their capabilities. This is because commonly used datasets lack high-quality textual user queries that reflect real-world recommendation scenarios, making them unsuitable for evaluating LLM-based personalized recommendation assistants. To address this gap, we introduce RecBench+, a new dataset benchmark designed to access LLMs' ability to handle intricate user recommendation needs in the era of LLMs. RecBench+ encompasses a diverse set of queries that span both hard conditions and soft preferences, with varying difficulty levels. We evaluated commonly used LLMs on RecBench+ and uncovered below findings: 1) LLMs demonstrate preliminary abilities to act as recommendation assistants, 2) LLMs are better at handling queries with explicitly stated conditions, while facing challenges with queries that require reasoning or contain misleading information.
Lin Wang,
Shijie Wang,
Sirui Huang, Qing Li
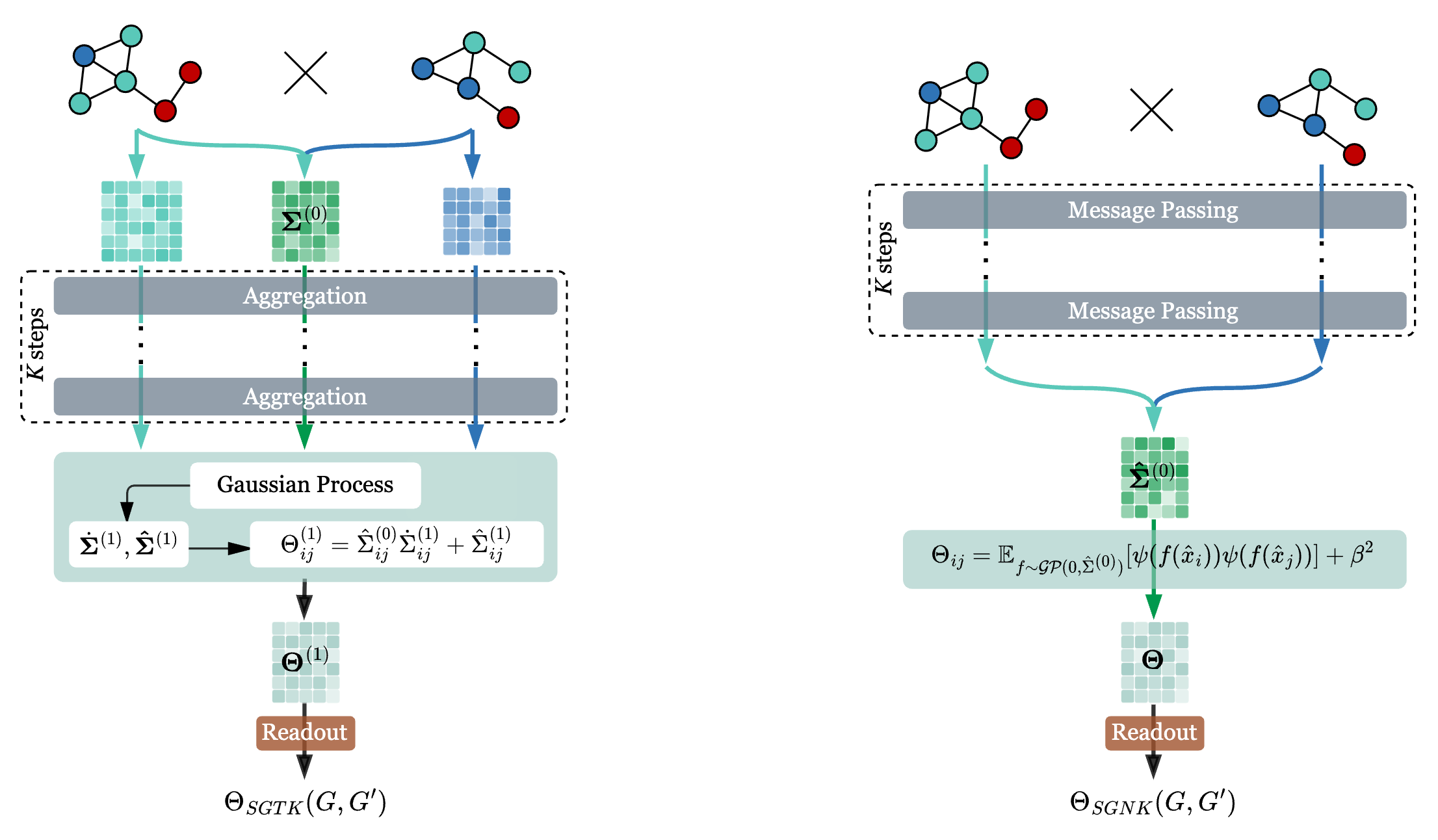
Simplifying Graph Kernels for Efficient
Simplifying Graph Kernels for Efficient
In
ICWL,
2025.
While kernel methods and Graph Neural Networks offer complementary strengths, integrating the two has posed challenges in efficiency and scalability. The Graph Neural Tangent Kernel provides a theoretical bridge by interpreting GNNs through the lens of neural tangent kernels. However, its reliance on deep, stacked layers introduces repeated computations that hinder performance. In this work, we introduce a new perspective by designing the simplified graph kernel, which replaces deep layer stacking with a streamlined K-step message aggregation process. This formulation avoids iterative layer-wise propagation altogether, leading to a more concise and computationally efficient framework without sacrificing the expressive power needed for graph tasks. Beyond this simplification, we propose another Simplified Graph Kernel, which draws from Gaussian Process theory to model infinite-width GNNs.
Wenqi Fan, Yi Zhou,
Shijie Wang,
Yuyao Yan, Hui Liu, Qian Zhao, Le Song, Qing Li
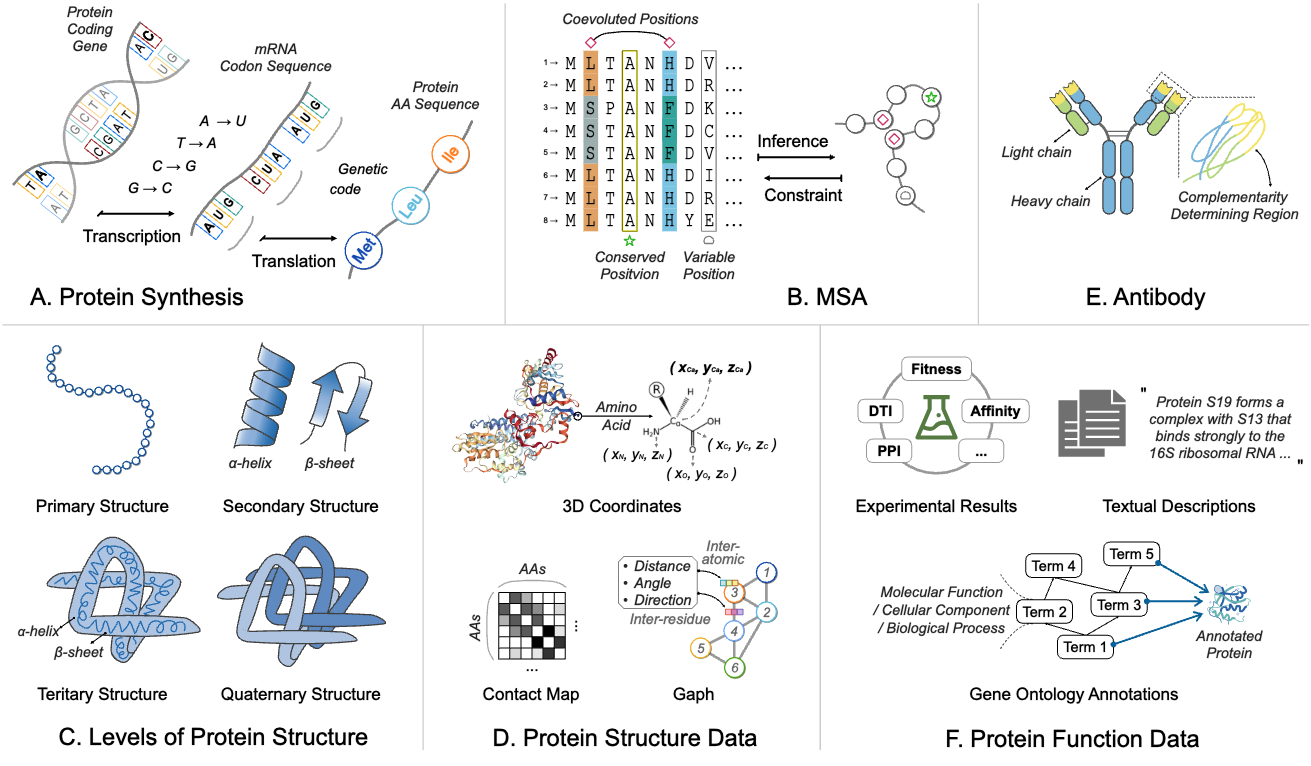
Computational Protein Science in the Era of Large Language Models (LLMs)
Computational Protein Science in the Era of Large Language Models (LLMs)
In
Preprint,
2025.
First, we summarize existing pLMs into categories based on their mastered protein knowledge, i.e., underlying sequence patterns, explicit structural and functional information, and external scientific languages. Second, we introduce the utilization and adaptation of pLMs, highlighting their remarkable achievements in promoting protein structure prediction, protein function prediction, and protein design studies. Then, we describe the practical application of pLMs in antibody design, enzyme design, and drug discovery. Finally, we specifically discuss the promising future directions in this fast-growing field.
Chengyi Liu, Jiahao Zhang,
Shijie Wang,
Wenqi Fan, Qing Li
Score-based Generative Diffusion Models for Social Recommendations
Score-based Generative Diffusion Models for Social Recommendations
In
TKDE,
2025.
In this paper, we tackle the low social homophily challenge from an innovative generative perspective, directly generating optimal user social representations that maximize consistency with collaborative signals. Specifically, we propose the Score-based Generative Model for Social Recommendation (SGSR), which effectively adapts the Stochastic Differential Equation (SDE)-based diffusion models for social recommendations. To better fit the recommendation context, SGSR employs a joint curriculum training strategy to mitigate challenges related to missing supervision signals and leverages self-supervised learning techniques to align knowledge across social and collaborative domains. Extensive experiments on real-world datasets demonstrate the effectiveness of our approach in filtering redundant social information and improving recommendation performance.
Shijie Wang,
Wenqi Fan, Xiao-yong Wei, Xiaowei Mei, Shanru Lin, Qing Li
Multi-agent Attacks for Black-box Social Recommendations
Multi-agent Attacks for Black-box Social Recommendations
In
Transactions on Information Systems (TOIS),
2024.
To perform untargeted attacks on social recommender systems, attackers can construct malicious social relationships for fake users to enhance the attack performance. However, the coordination of social relations and item profiles is challenging for attacking black-box social recommendations. To address this limitation, we first conduct several preliminary studies to demonstrate the effectiveness of cross-community connections and cold-start items in degrading recommendations performance. Specifically, we propose a novel framework Multiattack based on multi-agent reinforcement learning to coordinate the generation of cold-start item profiles and cross-community social relations for conducting untargeted attacks on black-box social recommendations. Comprehensive experiments on various real-world datasets demonstrate the effectiveness of our proposed attacking framework under the black-box setting.
Liangbo Ning*,
Shijie Wang*,
Wenqi Fan, Qing Li, Xu Xin, Hao Chen, Feiran Huang
CheatAgent: Attacking LLM-Empowered Recommender Systems via LLM Agent
CheatAgent: Attacking LLM-Empowered Recommender Systems via LLM Agent
In
KDD,
2024.
In this paper, we propose a novel attack framework called CheatAgent by harnessing the human-like capabilities of LLMs, where an LLM-based agent is developed to attack LLM-Empowered RecSys. Specifically, our method first identifies the insertion position for maximum impact with minimal input modification. After that, the LLM agent is designed to generate adversarial perturbations to insert at target positions. To further improve the quality of generated perturbations, we utilize the prompt tuning technique to improve attacking strategies via feedback from the victim RecSys iteratively. Extensive experiments across three real-world datasets demonstrate the effectiveness of our proposed attacking method.
Yujuan Ding, Wenqi Fan, Liangbo Ning,
Shijie Wang,
Hengyun Li, Dawei Yin, Tat-Seng Chua, Qing Li
A Survey on RAG Meets LLMs: Towards Retrieval-Augmented Large Language Models
A Survey on RAG Meets LLMs: Towards Retrieval-Augmented Large Language Models
In
KDD,
2024.
In this survey, we comprehensively review existing research studies in retrieval-augmented large language models (RA-LLMs), covering three primary technical perspectives: architectures, training strategies, and applications. As the preliminary knowledge, we briefly introduce the foundations and recent advances of LLMs. Then, to illustrate the practical significance of RAG for LLMs, we categorize mainstream relevant work by application areas, detailing specifically the challenges of each and the corresponding capabilities of RA-LLMs. Finally, to deliver deeper insights, we discuss current limitations and several promising directions for future research.
Jiahao Zhang, Lin Wang,
Shijie Wang,
Wenqi Fan
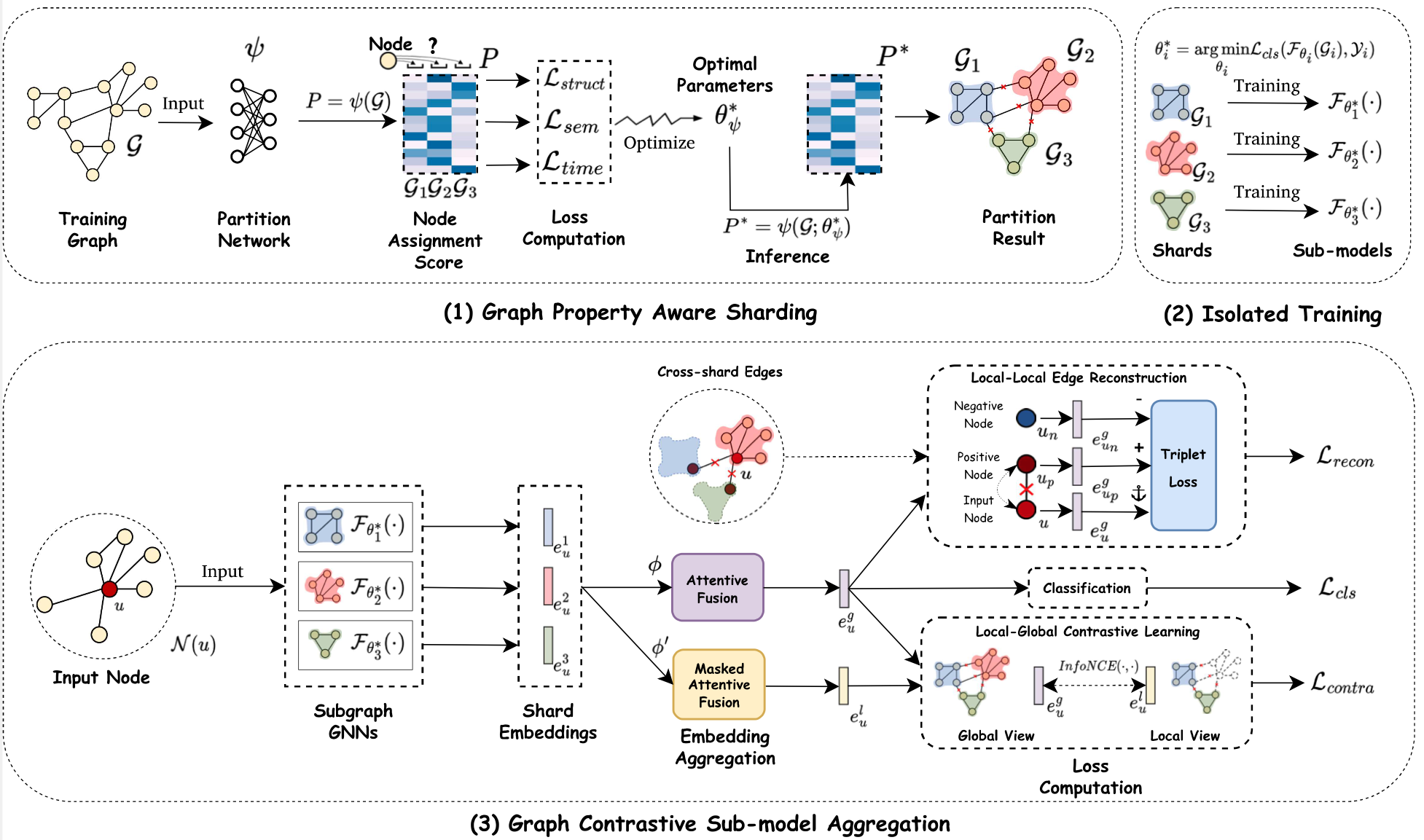
Graph Unlearning with Efficient Partial Retraining
Graph Unlearning with Efficient Partial Retraining
In
WWW PhD Symposium,
2024.
Graph Neural Networks (GNNs) have achieved remarkable success in various real-world applications. However, GNNs may be trained on undesirable graph data, which can degrade their performance and reliability. To enable trained GNNs to efficiently unlearn unwanted data, a desirable solution is retraining-based graph unlearning, which partitions the training graph into subgraphs and trains sub-models on them, allowing fast unlearning through partial retraining. However, the graph partition process causes information loss in the training graph, resulting in the low model utility of sub-GNN models. In this paper, we propose GraphRevoker, a novel graph unlearning framework that better maintains the model utility of unlearnable GNNs.
Shijie Wang,
Shangbo Wang
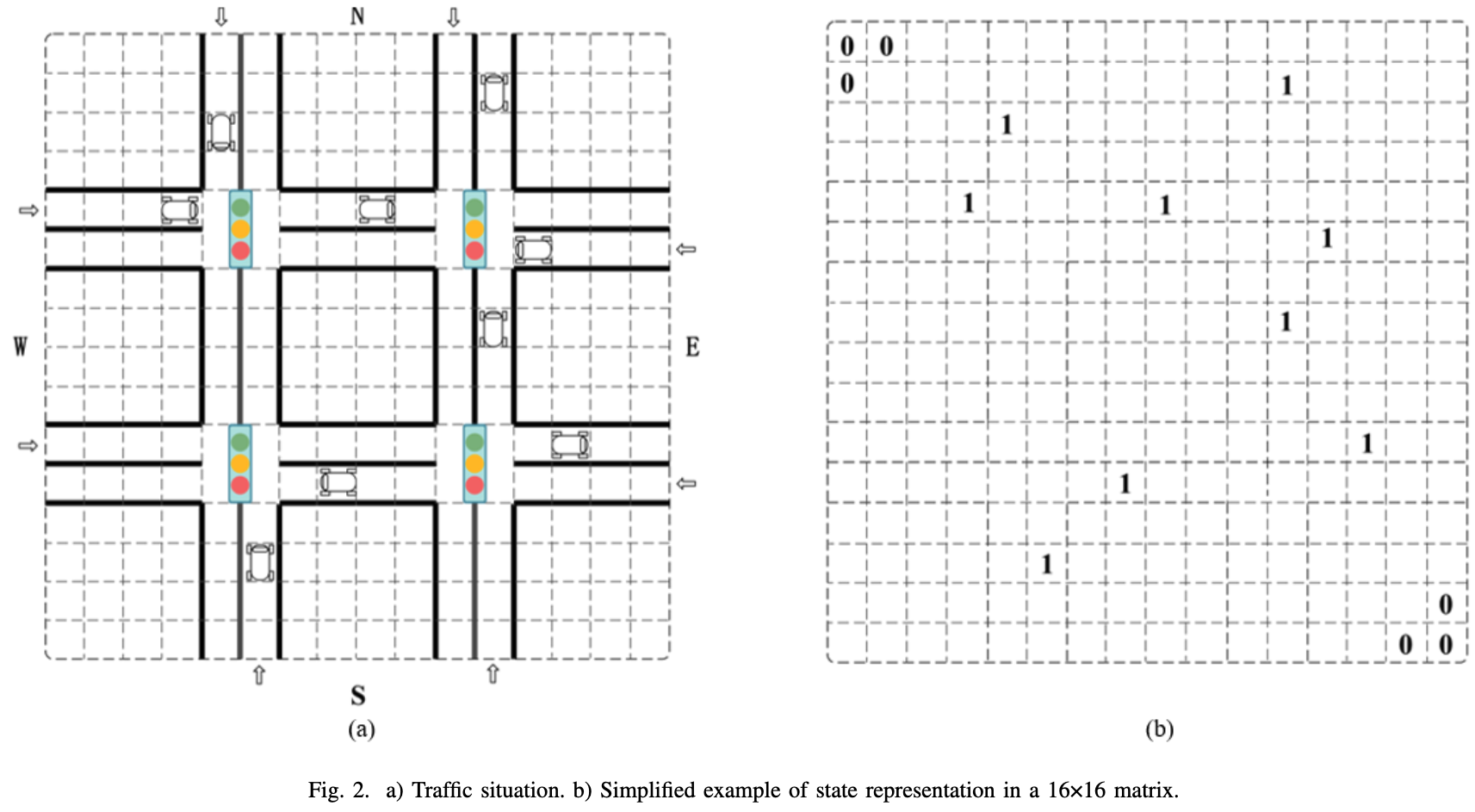
A novel Multi-Agent Deep RL Approach for Traffic Signal Control
A novel Multi-Agent Deep RL Approach for Traffic Signal Control
In
PerCom Workshop,
2023.
As travel demand increases and urban traffic condition becomes more complicated, applying multi-agent deep reinforcement learning (MARL) to traffic signal control becomes one of the hot topics. The rise of Reinforcement Learning (RL) has opened up opportunities for solving Adaptive Traffic Signal Control (ATSC) in complex urban traffic networks, and deep neural networks have further enhanced their ability to handle complex data. Traditional research in traffic signal control is based on the centralized Reinforcement Learning technique. However, in a large-scale road network, centralized RL is infeasible because of an exponential growth of joint state-action space. In this paper, we propose a Friend-Deep Q-network (Friend-DQN) approach for multiple traffic signal control in urban networks, which is based on an agent-cooperation scheme. In particular, the cooperation between multiple agents can reduce the state-action space and thus speed up the convergence.
Cite Simplifying Graph Kernels for Efficient
@article{wang2025simplifying,
title={Simplifying Graph Kernels for Efficient},
author={Wang, Lin and Wang, Shijie and Huang, Sirui and Li, Qing},
journal={arXiv preprint arXiv:2507.03560},
year={2025}
}
Cite Mixture-of-Experts Knowledge Graph Retrieval-Augmented Generation for Multi-Agent LLM-based Recommendation
@article{wang2026mixture,
title={Mixture-of-Experts Knowledge Graph Retrieval-Augmented Generation for Multi-Agent LLM-based Recommendation},
author={Wang, Shijie and Liu, Chengyi and Ding, Yujuan and Lin, Shanru and Ng, See-Kiong and Xin, Xu and Fan, Wenqi},
journal={arXiv preprint arXiv:2605.28175},
year={2026}
}
Cite ReRec: Reasoning-Augmented LLM-based Recommendation Assistant via Reinforcement Fine-tuning
@article{huang2026rerec,
title={ReRec: Reasoning-Augmented LLM-based Recommendation Assistant via Reinforcement Fine-tuning},
author={Huang, Jiani and Wang, Shijie and Ning, Liangbo and Fan, Wenqi and Li, Qing},
journal={arXiv preprint arXiv:2604.07851},
year={2026}
}
Cite Continuous-time Discrete-space Diffusion Model for Recommendation
@article{liu2025continuous,
title={Continuous-time Discrete-space Diffusion Model for Recommendation},
author={Liu, Chengyi and Chen, Xiao and Wang, Shijie and Fan, Wenqi and Li, Qing},
journal={arXiv preprint arXiv:2511.12114},
year={2025}
}
Cite Towards Next-Generation Recommender Systems: A Benchmark for Personalized Recommendation Assistant with LLMs
@article{huang2025towards,
title={Towards Next-Generation Recommender Systems: A Benchmark for Personalized Recommendation Assistant with LLMs},
author={Huang, Jiani and Wang, Shijie and Ning, Liang-bo and Fan, Wenqi and Wang, Shuaiqiang and Yin, Dawei and Li, Qing},
journal={arXiv preprint arXiv:2503.09382},
year={2025}
}
Cite Computational Protein Science in the Era of Large Language Models (LLMs)
@article{fan2025computational,
title={Computational Protein Science in the Era of Large Language Models (LLMs)},
author={Fan, Wenqi and Zhou, Yi and Wang, Shijie and Yan, Yuyao and Liu, Hui and Zhao, Qian and Song, Le and Li, Qing},
journal={arXiv preprint arXiv:2501.10282},
year={2025}
}
Cite Knowledge Graph Retrieval-Augmented Generation for LLM-based Recommendation
@article{wang2025knowledge,
title={Knowledge Graph Retrieval-Augmented Generation for LLM-based Recommendation},
author={Wang, Shijie and Fan, Wenqi and Feng, Yue and Ma, Xinyu and Wang, Shuaiqiang and Yin, Dawei},
journal={arXiv preprint arXiv:2501.02226},
year={2025}
}
Cite Score-based Generative Diffusion Models for Social Recommendations
@article{liu2024score,
title={Score-based Generative Diffusion Models for Social Recommendations},
author={Liu, Chengyi and Zhang, Jiahao and Wang, Shijie and Fan, Wenqi and Li, Qing},
journal={arXiv preprint arXiv:2412.15579},
year={2024}
}
Cite CheatAgent: Attacking LLM-Empowered Recommender Systems via LLM Agent
@inproceedings{ning2024cheatagent,
title={CheatAgent: Attacking LLM-Empowered Recommender Systems via LLM Agent},
author={Ning, Liang-bo and Wang, Shijie and Fan, Wenqi and Li, Qing and Xu, Xin and Chen, Hao and Huang, Feiran},
booktitle={Proceedings of the 30th ACM SIGKDD Conference on Knowledge Discovery and Data Mining},
pages={2284--2295},
year={2024}
}
Cite A Survey on RAG Meets LLMs: Towards Retrieval-Augmented Large Language Models
@article{ding2024survey,
title={A Survey on RAG Meets LLMs: Towards Retrieval-Augmented Large Language Models},
author={Ding, Yujuan and Fan, Wenqi and Ning, Liangbo and Wang, Shijie and Li, Hengyun and Yin, Dawei and Chua, Tat-Seng and Li, Qing},
journal={arXiv preprint arXiv:2405.06211},
year={2024}
}
Cite Graph Machine Learning in the Era of Large Language Models (LLMs)
@article{fan2024graph,
title={Graph Machine Learning in the Era of Large Language Models (LLMs)},
author={Fan, Wenqi and Wang, Shijie and Huang, Jiani and Chen, Zhikai and Song, Yu and Tang, Wenzhuo and Mao, Haitao and Liu, Hui and Liu, Xiaorui and Yin, Dawei and others},
journal={arXiv preprint arXiv:2404.14928},
year={2024}
}
Cite Graph Unlearning with Efficient Partial Retraining
@article{zhang2024graph,
title={Graph Unlearning with Efficient Partial Retraining},
author={Zhang, Jiahao and Wang, Lin and Wang, Shijie and Fan, Wenqi},
journal={arXiv preprint arXiv:2403.07353},
year={2024}
}Cite Multi-agent Attacks for Black-box Social Recommendations
@article{wang2023multi,
title={Multi-agent Attacks for Black-box Social Recommendations},
author={Wang, Shijie and Fan, Wenqi and Wei, Xiao-yong and Mei, Xiaowei and Lin, Shanru and Li, Qing},
journal={ACM Transactions on Information Systems},
year={2023},
publisher={ACM New York, NY}
}Cite A novel multi-agent deep RL approach for traffic signal control
@inproceedings{shijie2023novel,
title={A novel multi-agent deep RL approach for traffic signal control},
author={Shijie, Wang and Shangbo, Wang},
booktitle={2023 IEEE International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events (PerCom Workshops)},
pages={15--20},
year={2023},
organization={IEEE}
}